본 발명에 따르면 차량 경보 시스템은 운전 중 차량의 실제 동작상태에 따라 주행차선의 이탈시점을 감지하여 알림으로써, 사용자가 이를 사전에 인지할 수 있도록 하여 신뢰성이 증대되는 이점이 있으며, 주행차선에 대해 임계선을 설정함으로써, 주행차선을 이탈하기 전 미리 경보를 수행할 수 있어 대형사고를 미연에 방지할 수 있는 효과가 있다.
본 발명은 차량 경보 시스템에 관한 것으로서, 특히 운전자의 부주의나 졸음 운전으로 인하여 주행차선을 이탈하는 경우 발생되는 충돌사고 및 추돌사고를 예방하기 위하여 주행차선의 차선이탈 판단에 대한 정확도가 향상 되도록 하는 차량 경보 시스템에 관한 것이다.
일반적으로, 차량 경보 시스템은 자동차 전면에 부착된 카메라 및 상기 카메라와 연결되어 경고음을 출력하는 경보 출력부를 포함한다.
여기서, 카메라는 CCD 카메라로서, 실시간으로 도로 전방의 영상정보를 획득함에 따라 차량의 차선 이탈여부를 감지한다.
경보 출력부는 카메라가 출력한 도로 영상정보를 실시간으로 분석하여 차량이 차선을 이탈한 경우, 운전자에게 위급 상황의 통보를 위하여 경보신호를 출력한다.
그러나, 상기와 같이 구성되는 차량 경보 시스템은 카메라를 통해 감지되는 경과치만으로 차선 이탈 여부를 판단함에 따라 실제 위치와는 다르게 감지되어, 사용자의 신뢰성이 저하되는 문제가 있다.
특허 기술 설명
본 발명의 목적은, 운전 중 주행차선을 이탈 시점을 알려 사용자가 이를 사전에 인지할 수 있도록하며, 주행차선을 이탈하기 전 미리 경보를 수행하도록 하는 차량 경보 시스템을 제공함에 있다.
상기한 과제를 해결하기 위한 본 발명에 따른 차량 경보 시스템은 차량 주행 중 주행차로의 차선을 감지하는 주행차선감지부, 다수의 센서와 연결되어, 상기 차량의 움직임을 실시간으로 감지하는 동작감지부, 상기 주행차선 감지부 및 동작감지부를 통해 감지된 데이터에 따라 상기 차량의 주행차선이탈시점을 산출하여 출력되도록 제어하며, 상기 주행차선감지부를 통해 감지된 데이터에 기초하여 상기 주행차선에 대한 임계선을 설정하고, 상기차량이 상기 설정된 임계선에 도달한 경우 그에 대응하는 경보신호를 출력하는 제어부 및 상기 제어부로부터 출력된 경보신호에 따라 제1 경보수단 및 제2 경보수단 중 적어도 하나가 구동되도록 제어하는 경보장치구동부를 포함한다.
첨부된 도면을 참조하여 본 발명의 실시예를 설명하면 다음과 같다.
발명의 일실시예에 따른 차량 경보 시스템의 구성
도1)
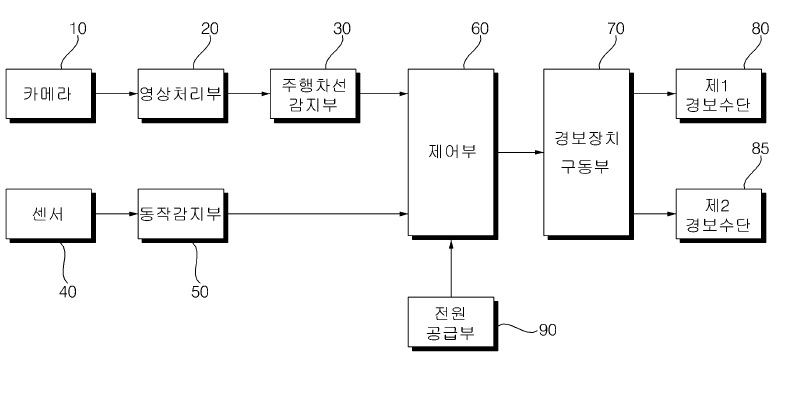
본 발명에 따른 차량 경보 시스템은 도 1에 도시된 바와 같이, 카메라(10), 카메라(10)를 통해 입력된 신호를 영상 처리하는 영상처리부(20), 촬영된 영상을 통해 차량 주행 중 주행차로의 차선을 감지하는 주행차선감지부(30), 다수의 센서(40), 연결된 다수의 센서(40)를 통해 차량의 움직임을 실시간으로 감지하는 동작감지부(50), 주행차선감지부(30) 및 동작감지부(50)를 통해 감지된 데이터에 따라 차량의 주행차선이탈시점을 산출하여 출력되도록 제어하며, 주행차선감지부(30)를 통해 감지된 데이터에 기초하여 주행차선에 대한 임계선을 설정하고,
차량이 기 설정된 임계선에 도달한 경우 그에 대응하는 경보신호를 출력하는 제어부(60) 및 제어부(60)로부터 출력된 경보신호에 따라 제1 경보수단(80) 및 제2 경보수단(85) 중 적어도 하나가 구동되도록 제어하는 경보장치구동부(70)를 포함한다. 또한, 차량 경보 시스템의 구동 전원을 공급하는 전원공급부(90)를 더 포함한다.
여기서, 다수의 센서(40)는 차량의 속도를 감지하는 차속센서, 차체의 회전 각속도를 감지하는 요레이트(yawrate) 센서, 측면 가속도를 감지하는 횡가속도센서, 핸들의 조향속도, 조향방향 및 조향각을 검출하는 조향각센서 등을 포함하며, 또한 방향지시등, 와이퍼 등의 동작을 감지하는 센서를 포함한다.
한편, 제어부(60)는 주행차선을 기준으로 소정거리 이내에 임계선을 설정한다.
이때, 임계선은 주행차선의 내측으로 설정되는 제1 임계선 및 주행차선의 외측으로 설정되는 제2 임계선을 포함한다.
이때, 제어부(60)는 차량이 제1 임계선에 도달한 경우 제1 경보신호를 경보장치구동부(70)로 출력하며, 차량이 제2 임계선에 도달한 경우에는 제2 경보신호를 경보장치구동부(70)로 출력한다. 따라서, 경보장치구동부(70)는 제어부(60)로부터 제1경보신호가 인가되면 제1 경보수단(80)이 구동되도록 하고, 제2경보신호가 인가되면 제2 경보수단(85)이 구동되도록 한다.
여기서, 제1 경보수단(80)은 촉각경보장치로서 전동안전벨트 및 조향 엑츄에이터 중 적어도 하나를 통해 촉각경보를 수행한다. 뿐만 아니라, 진동모터 등을 이용하여 핸들, 좌석 등에서 진동이 출력된다.
한편, 제2 경보수단(85)은 경보음 출력장치로서 부저, 스피커 등의 음성출력수단을 포함하며, 이를 통해 경고음이 출력된다.
이때, 제2 경보신호가 인가된 경우에는 제1경보수단 및 제2경보수단이 동시에 구동되도록 할 수도 있다.
구성되는 차량 경보 시스템 상세한 설명
도2)
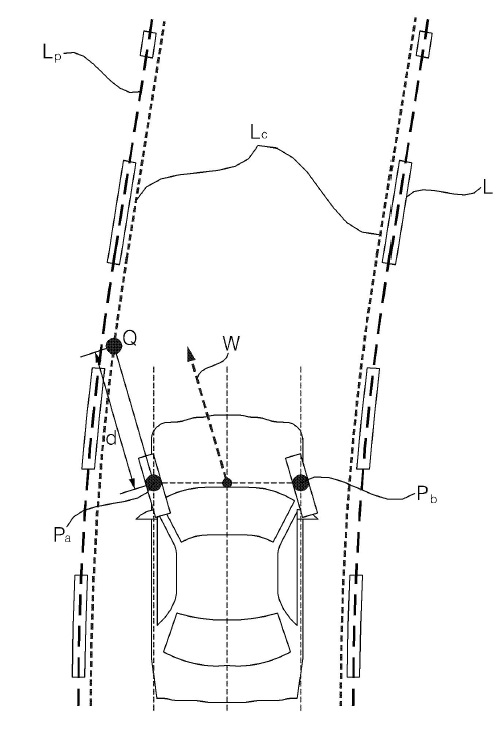
도 2는 본 발명의 일실시예에 따른 차량 경보 시스템의 동작을 설명하기 위해 참조되는 도이다. 도 2를 참조하면, 제어부(60)는 차량 주행 시 구비된 다수의 센서(40)를 통해 차량의 주행속도(V) 및 주행방향(W) 등을 감지한다.
이때, 제어부(60)는 좌측 전륜 및 우측 전륜 중 어느 하나의 중심점(Pa, Pb)을 기준점으로 설정한다.
또한, 제어부(60)는 주행 중 카메라(10)를 동작시켜 주행차선감지부(30)를 통해 주행 방향의 차선(L)을 인식하고, 이때 차선(L)으로부터 감지된 주행차선(LP)에 대한 임계선(LC)을 설정한다.
제어부(60)는 기준점으로부터 주행방향(W)의 임계선(LC)과 만나는 임계점(Q)까지의 거리, 즉 이탈추정거리(d)를 산출하고, 산출된 이탈추정거리(d)를 주행속도(V)로 나눈 값( td= d/v)에 의하여 주행차선이탈시점(td)을 감지한다.
즉, 이때, 기준점은 좌측 전륜과 우측 전륜 중 주행방향(W)의 차선에 가까운 것으로 설정한다.
다시 말해, 차량의 주행방향(W)이 좌측 차선을 향하고 있는 경우에는 좌측 전륜의 중심점(Pa)을 기준점으로하고, 차량의 주행방향이 우측 차선을 향하고 있는 경우에는 우측 전륜의 중심점(Pb)을 기준점으로 한다.
따라서, 제어부(60)는 산출된 이탈추정거리(d) 및 주행차선이탈시점(td)이 출력되도록 하고, 만일 기준점이 임계선(LC)을 이탈한 경우 그에 대응하는 경보신호를 경보장치구동부(70)로 출력한다.
이때, 경보장치구동부(70)는 입력된 경보신호에 따라 제1 경보수단(80) 및 제2 경보수단(85) 중 적어도 하나가 구동되도록 한다.
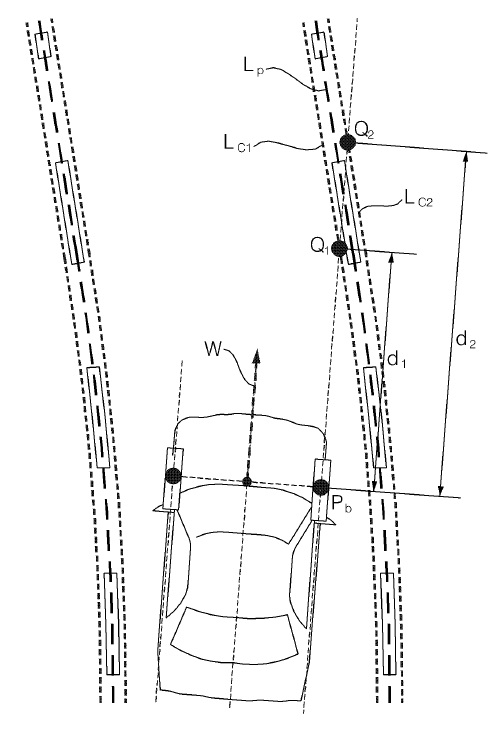
도 3은 도 2의 설명을 구체화하기 위해 참조되는 도면이다.
도3)
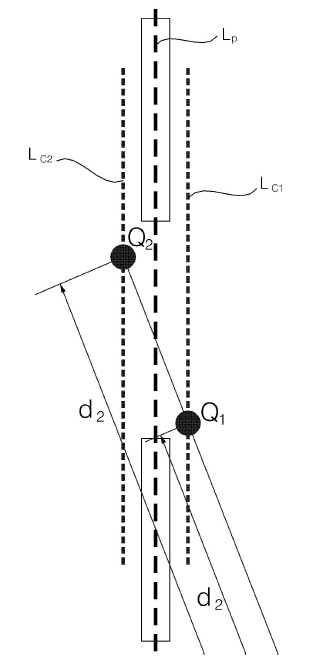
도 3을 참조하면, 제어부(60)는 좌측 전륜의 중심점이 기준점인 경우, 차량의 좌측 주행차선(LP)을 중심으로 설정된 임계선(LC) 중 우측 임계선이 제1 임계선(LC1)이고, 좌측 임계선이 제2 임계선(LC2)이 된다.
이때, 기준점으로부터 주행방향으로 제1 임계선(LC1)과 만나는 점을 제1 임계점(Q1), 제2 임계선(LC2)과 만나는 점을 제2 임계점(Q2)이라 한다. 만일, 차량의 진행 방향에 따라 제1 임계점(Q1) 및 제2 임계점(Q2)은 수시로 변경된다.
여기서, 기준점과 제1 임계점(Q1) 간 거리를 제1 이탈추정거리(d1), 기준점과 제2 임계점(Q2) 간 거리를 제2 이탈추정거리(d2)라 칭하며, 제어부(60)는 제1 이탈추정거리(d1) 및 제2 이탈추정거리(d2) 및 주행속도를 이용하여 주행차선이탈시점(td)을 산출한다.
일실시예에 따른 동작 감지부의 동작
도4)
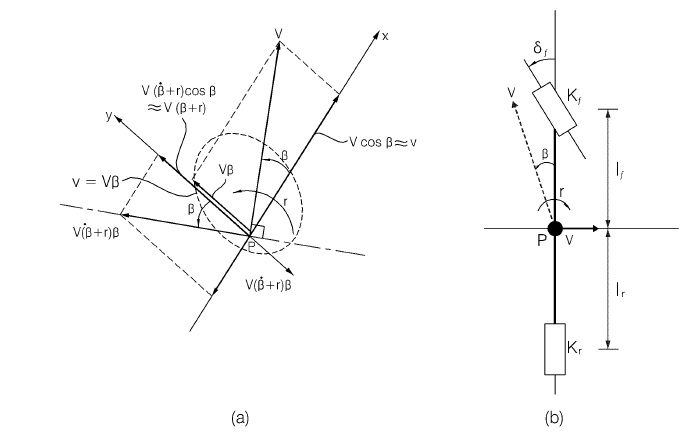
도 4를 참조하면, 동작감지부(50)는 연결된 다수의 센서(40)로부터 인가된 데이터에 기초하여, 차량의 움직임을 감지한다.
먼저, 도 4의 (a)는 물리적 차량 모델을 기준으로 한 전륜 및 후륜을 기준으로 실제 차량의 움직임을 감지하기 위해 적용되는 예를 도시한 도이고, 도 4의 (b)는 도 4의 (a)를 참조하여, 실제 차량의 움직임을 감지하기 위해 참조되는 수학 모델을 도시한 도면이다.
적용되는 식은 아래 [수학식 1]과 같다.
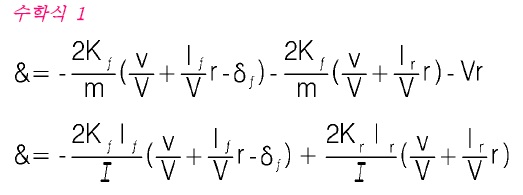
여기서, δf는 전륜각(=조향각/조향비), v는 횡가속도, r은 요레이트, Kf는 전륜 코너링 파워, Kr은 후륜 코너링 파워, V는 속도, m은 중량, I는 관성 모멘트이고, 이는 다수의 센서(40)를 통해 감지된 데이터를 통해 확인할 수 있다.
또한, β는 실제차랑진행각으로서, 'v=Vβ'로부터 산출해 낼 수 있다.
따라서, 제어부(60)는 도 4의 (a) 및 (b)와 [수학식 1]을 통해 실제차량의 진행방향 등의 움직임을 감지할 수 있다.
도 5는 본 발명의 다른 실시예에 따른 차량 경보 시스템의 동작을 설명하기 위해 참조되는 도로서
도5)
도 5는 도 3과 달리 우측 전륜을 기준으로 하여 주행방향이 우측 주행차선(LP)을 향하고 있을 때의 실시예를 도시한 도면이다.
도 5를 참조하면, 주행방향이 차량의 일직선 방향일 경우, 제어부(60)는 우측 전륜의 중심점인 기준점으로부터 주행방향으로 제1 임계선(LC1)과 만나는 제1 임계점(Q1) 및 제2 임계선(LC2)과 만나는 제2 임계점(Q2)을 감지한다.
이때, 도 3에서와 달리, 주행차선(LP)의 좌측으로 소정거리 이내에 설정된 임계선을 제1 임계선(LC1), 주행차선(LP)의 우측에 설정된 임계선을 제2 임계선(LC2)으로 한다. 제어부(60)는 감지된 제1 임계점(Q1) 및 제2 임계점(Q2)과 기준점 간 거리인 이탈추정거리(d)를 산출하고, 그에 기초하여 주행차선이탈시점(td)을 감지한다.
본 발명의 일실시예에 따른 차량 경보 시스템의 동작 흐름
도6)
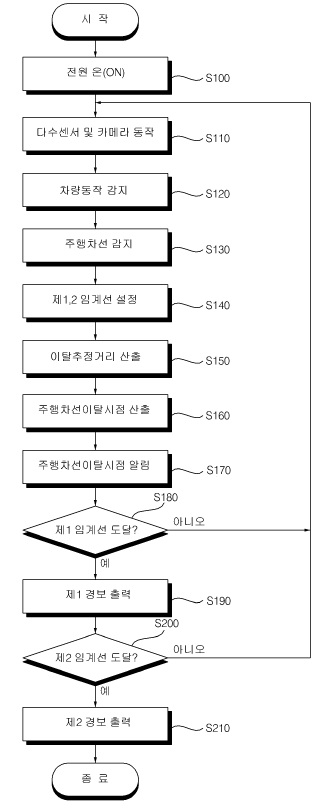
도 6에 도시된 바와 같이, 차량 경보 시스템의 전원이 온(on) 되면(S100), 제어부(60)는 연결된 카메라(10) 및 다수 센서(40)가 동작되도록 한다(S110).
이때, 동작감지부(50)는 다수의 센서(40) 동작에 따라 감지된 데이터를 이용하여 실제 차량의 움직임을 실시간으로 감지한다(S120).
한편, 주행차선감지부(30)는 카메라(10)를 통해 촬영되는 영상으로부터 주행차선(LP)을 감지하고, 이때 제어부(60)는 주행차선감지부(30)를 통해 감지된 주행차선(LP)에 대한 제1 임계선(LC1) 및 제2 임계선(LC2)을 설정한다(S140).
여기서, 제1 임계선(LC1) 및 제2 임계선(LC2)은 감지된 주행차선(LP)으로부터 소정거리 이내의 간격을 유지하도록 설정된다.
제어부(60)는 동작 감지부를 통해 감지된 실체 차량의 움직임 데이터와, 주행차선감지부(30)를 통해 감지된 주행차선(LP)에 대해 설정된 제1 임계선(LC1) 및 제2 임계선(LC2)을 이용하여, 현재 차량의 움직임에 따른 이탈추정거리(d1, d2)를 산출하고(S150), 그에 대한 주행차선이탈시점(td)을 산출한다(S160).
산출된 이탈추정거리(d1,d2) 및 그에 대한 주행차선이탈시점(td)은 차량의 출력수단을 통해 출력된다(S170).
여기서, 출력수단은 오디오등을 포함하며, 영상출력수단이 구비된 경우에는 이를 통해서 출력하는 것 또한 가능하다.
한편, 차량이 기 설정된 임계선(LC)에 도달한 경우, 제어부(60)는 경보신호를 출력함으로써 사용자가 이를 쉽게 인지할 수 있도록 한다.
여기서, 차량이 기 설정된 제1 임계선(LC1)에 도달한 경우(S180), 제어부(60)는 1차 경보신호를 경보장치구동부(70)로 출력하고, 이때 경보장치구동부(70)는 인가된 1차 경보신호에 따라 제1 경보수단(80)이 동작되도록 한다(S190).
만일, 차량이 기 설정된 제2 임계선(LC2)에 도달한 경우(S200), 제어부(60)는 2차 경보신호를 경보장치 구동부(70)로 출력한다.
이때, 경보장치구동부(70)는 제2 경보수단(85)이 동작되도록 하거나, 혹은 제1 경보수단(80)과 제2 경보수단(85)이 함께 동작되도록 한다(S210).
이상과 같이 본 발명에 의한 차량 경보 시스템은 예시된 도면을 참조로 설명하였으나, 본 명세서에 개시된 실시예와 도면에 의해 본 발명은 한정되지 않고, 기술사상이 보호되는 범위 이내에서 응용될 수 있다.
발명자: 이재관, 심성보
대리인: 박병창
|
권 리 란 |
|
표시번호 |
사 항 |
|
1번 |
|
출원 연월일 : |
2007년 07월 16일 |
출 원 번 호 : |
10-2007-0071245 |
|
공고 연월일 : |
2011년 09월 07일 |
공 고 번 호 : |
|
|
특허결정(심결)연월일 : |
2011년 08월 27일 |
청구범위의 항수 : |
7 |
|
유 별 : |
B60W 30/12 |
|
발명의 명칭 : |
차량 경보 시스템 |
|
존속기간(예정)만료일 : |
2027년 07월 16일 |
|
2011년 09월 01일 등록 | |
|
특 허 권 자 란 |
|
순위번호 |
사 항 |
|
1번 |
|
(등록권리자) |
|
현대자동차주식회사 |
|
|
서울 서초구 양재동 *** |
|
|
기아자동차주식회사 |
|
|
서울특별시 서초구 양재동 *** |
|
|
2011년 09월 01일 등록 | |
'차량 경보 시스템' 특허 자세히 보기
 동향
동향
 차량 / 처리조작
차량 / 처리조작
