특허의 효과
로봇 청소기가 충전대에 위치한 다수의 발진부에서 각기 출력되는 적외선신호를 수신하고, 그 수신된 서로 다른 코드의 적외선신호를 분석하여, 로봇 청소기의 현재 위치와 각도를 빠르게 유추함으로써, 자동 충전시, 로봇청소기를 충전대에 정확하고 신속하게 복귀시킬 수 있는 효과가 있다.
특허 기술 설명:
본 발명은 로봇 청소기의 자동충전 복귀장치 및 방법에 관한 것으로, 로봇 청소기가 충전대에 위치한 다수의 발진부에서 각기 출력되는 적외선신호를 수신하고, 그 수신된 서로 다른 코드의 적외선신호를 분석하여, 로봇 청소기의 현재 위치와 각도를 빠르게 유추하여, 충전대에 자동으로 복귀하도록 한 것이다.
이를 위하여 본 발명은 충전대의 소정 위치에 각기 설치되어, 서로 다른 고유의 코드를 갖고, 각기 다른 방향으로 적외선신호를 발생하는 다수의 발신부와;
로봇 청소기 본체의소정 위치에 각기 위치하여, 상기 적외선신호를 수신하는 다수의 적외선 수신부와;
상기 적외선 수신부의 적외선신호에서,캐리어 주파수를 가진 적외선신호의 외곽선만을 검출하는 톤검출부와;
상기 톤검출부에서 출력되는 신호를 로우패스 필터링하여 그에 따른 직류신호를 출력하는 로우패스필터와;
상기 로우패스필터에서 출력되는 직류신호를 소정 임계치와 비교하여, 그 비교결과에 근거한 디지탈신호를 출력하는 비교기와;
상기 비교기의 디지탈신호와 로우패스필터의 직류신호로,충전대와의 각도 및 거리를 유추하여 충전대로의 자동복귀를 제어하는 모터구동제어부를 포함하여 구성한다.
로봇 청소기의 자동충전 복귀장치에 대한 구성을 보인 블록도
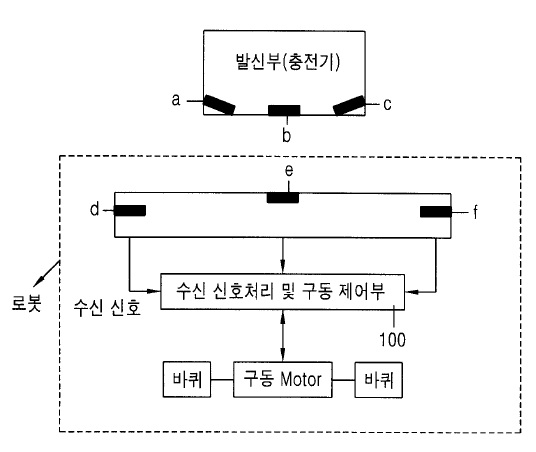
본 발명 로봇 청소기의 자동충전 복귀장치는, 충전대의 소정 위치에 설치되어, 서로 다른 코드를 갖고, 각기 다른 방향으로 적외선신호를 발생하는 발신부(a,b,c)와; 로봇 청소기 본체의 소정 위치에 각기 위치하여, 상기적외선신호를 수신하는 적외선 수신부(d,e,f)와; 상기 적외선 수신부(d,e,f)의 적외선신호를 이용하여, 충전대까지의 거리와 각도를 유추한후, 그 유추한 거리와 각도로 충전대로의 자동복귀를 제어하는 수신신호처리 및 구동제어부(100)를 포함하여 구성한다.
상기 발신부(a,b,c)는,각기 노이즈를 제거하기 위하여, 상기 적외선신호에 캐리어 주파수를 포함시키는 irda신호변환부를 포함한다.
수신신호처리 및 구동제어부
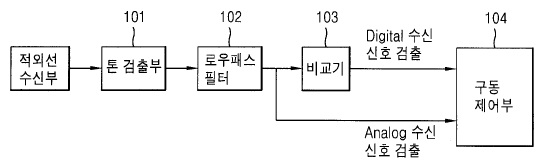
적외선 수신부(d,e,f)의 적외선신호에서, 캐리어 주파수를 가진 적외선신호의 외곽선만을 검출하는 톤검출부(101)와; 상기 톤검출부(101)에서 출력되는 신호를 로우패스 필터링하여 그에 따른 직류신호를 출력하는 로우패스필터(102)와; 상기 로우패스필터 (102)에서 출력되는 직류신호를 소정 임계치와 비교하여, 그 비교결과에 근거한 디지탈신호를 출력하는 비교기(103)와; 상기 비교기(103)의 디지탈신호와 로우패스필터(102)의 직류신호로, 충전대와의 각도 및 거리를 유추하여 충전대로의 자동복귀를 제어하는 구동제어부(104)로 구성한다.
발명의 자동충전 복귀 동작을 설명
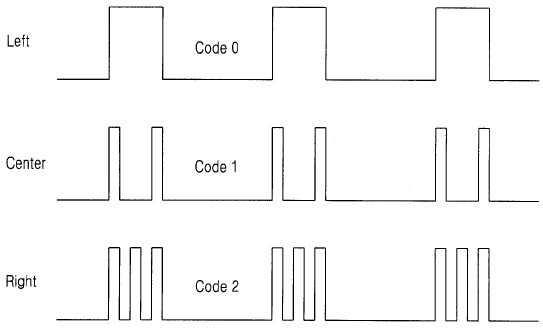
먼저, 발신부(a,b,c)는. 각기 충전대의 소정위치에 적외선소자가 등각으로 배치되어, 충전대 전방의 거의 전체 영역으로적외선신호의 발신이 가능하도록 배치되며, irda신호변환부를 포함하여, 각기, 노이즈를 제거하기 위하여 아래그림과 같이,
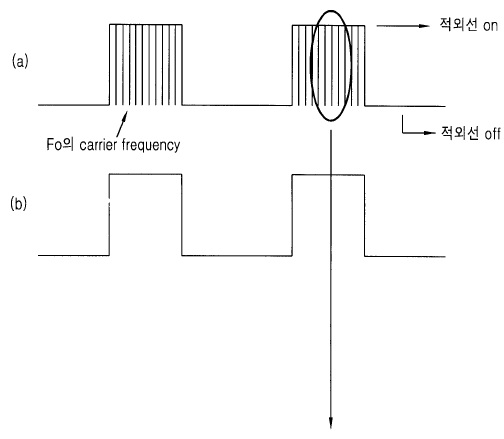
상기 적외선신호에 캐리어 주파수를 포함시켜, 그에 따른 적외선신호를 위 그림과 같이 출력한다.로봇 청소기 본체의 소정 위치에 각기 위치한, 적외선수신부(d,e,f)는 위 그림과 같은 적외선신호를, 아래그림과 같은 파형으로 수신하고, 수신신호처리 및 구동제어부(100)는, 아래그림과 같은 적외선신호를 이용하여, 충전대까지의 거리와각도를유추한후, 그 유추한 거리와 각도로 충전대로의 자동복귀를 제어한다
구동제어부(104)의 거리 유추 동작
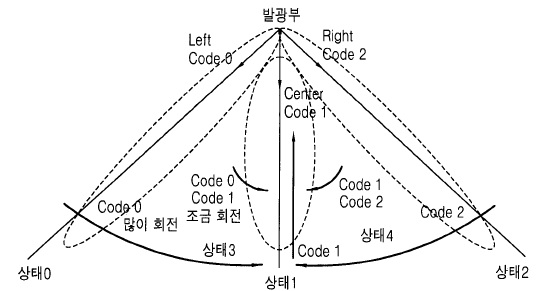
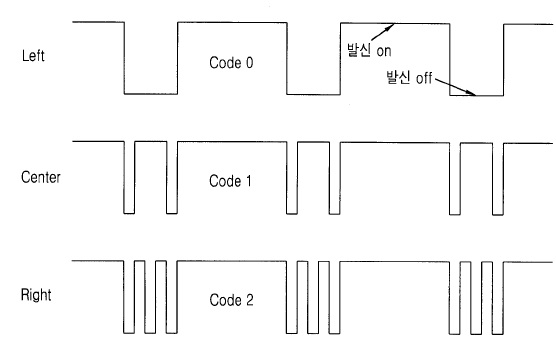
우선, 로봇 청소기가 '상태0' 위치에 있게 된다면, 수신부(d,e,f)의 적외선 센서 아래그림의 'code 0'의 신호가 수신되는데, 즉,현재 로봇 청소기의 위치가 충전대 좌측의 theata_L의 각도 부근에 있는 것을 알 수 있다.
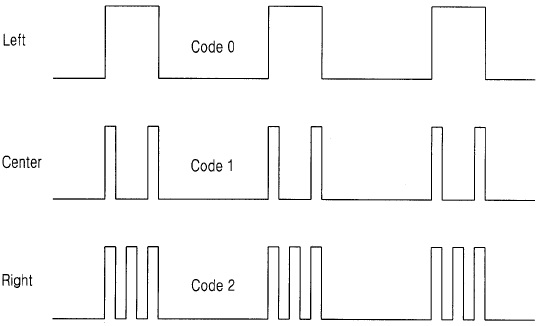
또한 '상태 1'의 위치에서는, 위그림의 'code 1'의 신호가 수신되고 각도는 정면부, '상태 2'의 위치에서는 'code2'의 신호가 수신되며 theta_R의 각도가 되므로, 개략적으로 수신된 신호에 따라 로봇의 위치를 판별이 가능하다.
또한, '상태 3'의 경우는 'code 0'과 'code 1'의 신호가 같이 수신되며, '상태4'의 경우는 'code 1'과 'code 2'가 같이 수신된다.
즉,' 상태 0의 신호수신시=Theta_L±viewing angle/2
상태 1의 신호수신시=±viewing angle/2
상태 2의 신호수신시=Theta_R±viewing angle/2
상태 3의 신호수신시=Theta_L±viewing angle/2 ~ ±viewing angle/2
상태 4의 신호수신시=±viewing angle/2 ~ Theta_R' 의 각도에 있는 것을 알 수 있다.
이렇게 로봇의 개략적인 각도를 통하여 상태별로 로봇청소기가 충전대의 정면부로 향하게 하는 회전 운동의 곡률 반경을 제어 한다.
본 발명의 다른 실시예에 따른 로봇 청소기의 자동충전 복귀방법의 동작흐름도
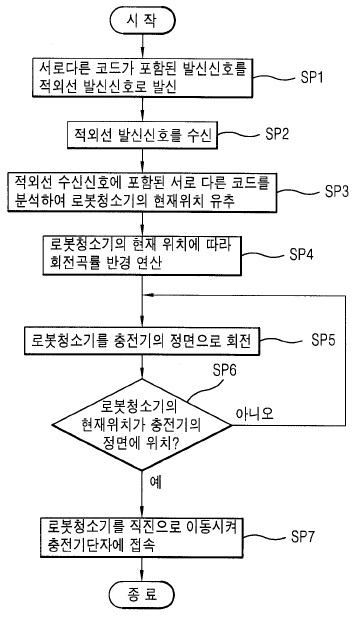
우선, 자동충전모드이면, 서로 다른 코드가 포함된 적외선신호를 수신한후 (SP1,SP2), 그 적외선신호에 포함된 서로 다른 코드를 분석하여, 로봇 청소기의 현재 위치를 유추한다(SP3).
즉, 회전곡률반경을, 적외선신호의 아날로그값에 의해, 유추되는 거리에 의해, 추정하여 구한다.
그 다음, 상기에서 유추된 로봇 청소기의 현재 위치에 따라, 회전 곡률 반경을 구하여 충전대의 정면으로 로봇 청소기를회전시킨다(SP4,SP5).
즉, 충전대 정면으로부터 현재 로봇 청소기의 위치가 가까우면 회전곡률반경을 작게 하고, 충전대 정면으로 부터 현재 로봇 청소기의 위치가 멀면 회전곡률반경을 크게 한다.
그 다음, 로봇 청소기가 정면으로 위치하게 되면, 로봇 청소기를 전방으로 이동시켜 충전대에 접근시킨후, 그 충전대의충전대 단자에 로봇 청소기를 접속시킨다(SP6,SP7)
즉, 좌/우 적외선 수신부(d,f)에서 수신된 아날로그값을 비교하여 로봇청소기의 로테이션값을 보정하여, 로봇청소기를 수직으로 충전대에 접근시킨다.
이때, 상기 로봇 청소기의 로우테이션값을 보정은, 하기의 수학식에 의해 좌/우 모터 회전수의 변화를 주어 수행한다.
[수학식]
M(좌/우모터명령)=K×(좌측 적외선수신센서의 아날로그값-우측 적외선수신센서의 아날로그값)
발명의 명칭 : 로봇청소기의 자동충전 복귀장치 및 방법
등록번호: 1004925380000
출원일: 2003년 01월 06일
등록일: 2005년 05월 23일
등록 권리자: 엘지전자 주식회사
발명자: 나재호
대리인: 박장원
‘로봇청소기의 자동충전 복귀장치 및 방법’ 특허 자세히 보기
 동향
동향
 생활필수품
생활필수품
